
Perception, otonom araçların etrafında olup bitenleri nasıl algıladığına verilen isimdir. Otonom araçlar, aracın etrafındaki ortamı gerçek zamanlı olarak işlemek ve anlamak için son teknoloji yazılımlarla birleştirilmiş yüksek teknoloji ürünü sensörler ve kameraların bir kombinasyonunu kullanır. Bu noktada otonom araçlar için büyük bir zorluk olan Perception problemine biraz daha yakından bakalım.
Perception’u algılama olarak da düşünebilirsiniz. Biz insanlar için çevremizde yaşanan olayları, çevremizde bulunan kişileri ve nesneleri algılamak çok da zor bir görev değildir. Çünkü duyu organlarımız bu işi bizi için sürekli olarak yapmakta, ayrıca beynimiz sayesinde de gelen veriyi anlamlandırabilmekteyiz. Söz konusu otonom araçlar olduğunda ise algı bu kadar kolay aşılabilecek bir kavram değil maalesef. Bu yazımda sizlere otonom araçların bu problemi aşmak için neler yaptığını anlatacağım.
İnsanlardan bahsederken algı için duyulardan bahsetmiştim. Otonom araçlar için buna benzer yapılar var. Mesela gözler yerine kameraları, mesafeleri ölçmek için radar veya lidar gibi yüksek teknoloji sensörleri bulunmakta. Perception problemini çözmek için ilk bakışta kamera temelli algı bu tespitler için yeterli görünebilir. Bununla birlikte, düşük aydınlatma, sert hava koşulları veya nesnelerin yoğun şekilde kapatıldığı koşullar kameraların görüşünü etkileyebilir. Bu yüzden radar veya lidar gibi sensörlerin kullanılması gereklidir. Bu sensörler sayesinde etrafındaki nesnelere olan uzaklık küçük hatalarla ölçülebilir. Otonom araçlar için uzaklığın sürekli zamanda değiştiği göz önüne alınırsa üretilecek verinin çokluğu tahmin edilebilir bir gerçektir. Bu noktada yapılması gereken ise yapay zeka gibi teknolojiler ile bu büyük verinin anlamlandırılmasıdır.
Yapay zekanın bu noktada birçok farklı alt kolu var. Bunlardan bir tanesi de Computer Vision, yani Bilgisayarlı Görü.
Bilgisayarlı Görü görüntüleri almak ve onları anlamlandırmak amacındadır. İnsanlar olarak nesneleri, görüntüleri ve bu nesneler arasındaki ilişkiyi otomatik olarak tanıyabiliriz. Ancak bilgisayarlar için görüntüler sadece kırmızı, yeşil ve mavi rengin bir karışımından ibarettir. Bu değerler görüntülerin piksellerini oluşturur ve bilgisayar ortamında her bir görüntü piksellerden oluşur.
Otonom araçların dünyayı algılamak için yapması gereken birkaç temel görev vardır:
- Algılama – bir nesnenin bir ortamda tam olarak nerede olduğunu bulmaya yarar.
- Sınıflandırma – nesnenin tam olarak ne olduğu anlamaya yarar.
- Takip – diğer araçlar, yayalar vb. hareketli nesneleri gözlemlemeye yarar.
- Segmentasyon – Bir görüntüdeki her pikseli yol, gökyüzü, araçlar gibi şematik kategoriyle eşleştirmeye yarar.
Bir diğer yapay zeka algoritması ise otonom araçlarda sıkça kullanılan Reinforcement Learning (RL)’dir. Kümülatif ödül kavramını en üst düzeye çıkarmak için akıllı araçların bir ortamda nasıl harekete geçmeleri gerektiği ile ilgili bir makine öğrenimi alanıdır.
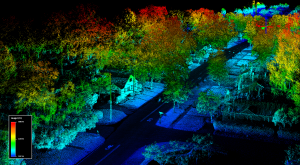
Son olarak sizlere yazımda daha önce de değindiğim lidar sensöründen bahsedeceğim. Dalgaları yayma ve alma ve mesafeyi belirlemek için kalan süreyi hesaplama açısından radara benzeyen lidar sensörleri, sürücüsüz bir otomobilin güvenilir bir şekilde çalışması için genellikle en önemli sensör olarak kabul edilir. Radyo dalgaları yerine, LiDAR sensörleri (LIght Detection And Ranging) her saniye çok sayıda hedeflenmiş lazer darbesi gönderir ve aracın etrafındaki alanda farklı nesneleri gösteren bir derinlik haritası veya nokta bulutu haritası oluşturur. Ne yazık ki, LiDAR sensörleri hala derinliğe dayalı çalışır. Bu nedenle trafik ışıkları ve yol işaretleri gibi çok önemli olmasına karşın derinliksiz olan unsurları tanımlamakta zorluk çeker.
Sonuç olarak:
- Radar, belirli bir yönde radyo sinyali yayan bir anten ve farklı nesneler arasındaki mesafeyi hesaplamak için radyo sinyalini ortamdaki nesnelerden sektikten sonra algılayan bir radyo alıcısı kullanan bir cihazdır. Benzer şekilde, LiDAR sensörleri de aynı şeyi yapar ancak lazer kullanır.
- Radarlar ve LiDAR’lar gibi sensörler, bir dizi kamerayla birlikte otomobilin dünyayı görme yoludur.